Module 100: Advanced Sequential Logic
Module 100: Advanced Sequential Logic
In the last module, we built registers and counters, then capped it off with a pipelined multiplier design. Such designs are very structural, meaning we can already imagine what the hardware would look like; we are merely describing the hardware connections. But what if we want to implement a whole algorithm?
Algorithms are made of steps, executed in order. In hardware, we capture this by introducing the idea of states. Each state represents one step of the algorithm. At every clock cycle, we can move from one state to another, just like advancing through the steps of a sequence. We will now be writing Finite State Machines (FSMs).
Code readability tip: Naming states using localparam
Whenever we implement FSMs, we typically have descriptive names to help us determine which state we are in at a given clock cycle. To make our code readable, we can give states names instead of raw binary numbers.
We use localparam for this. For example:
This way, instead of writing if (state == 2'b01), we can write if (state == STEP1), which is much clearer.
This is not limited to states. localparam can be used to assign meaningful names to constants, improving code readability. The name is not required to be written in all capital letters, like in the example above, but this is a highly preferred coding practice to easily distinguish constants defined using localparam.
FSM Design Example 1: Pattern detector
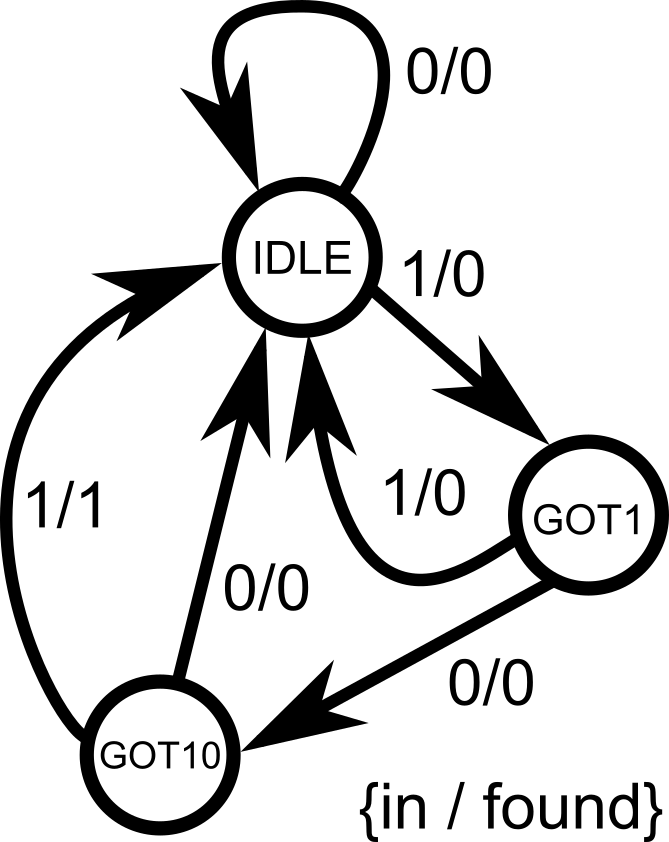
Suppose we want to detect the bit pattern 101. Whenever the pattern breaks, we have to start all over. The algorithm is:
- At state IDLE: If we then see a
0, we remain in IDLE. If we see a1, go to state GOT1. - At state GOT1:****If we then see a
0, go to state GOT10. If we see a1, the pattern is broken, we go back to IDLEto start over. - At state GOT10:If we then see a
0, the pattern is broken, go back to IDLE. If we see a1, the pattern is complete, assert output (set it to 1), and go back to IDLE to start all over again.
Let’s implement it.
module pattern_detector(
input clk, // system clock
input reset, // system reset (high-asserted)
input in, // serial input for pattern detection
output reg found // 1-bit output to indicate that the pattern is found
);
// State encoding using localparam
localparam IDLE = 2'b00,
GOT1 = 2'b01,
GOT10 = 2'b10;
// internal variable that will hold the current state information
reg [1:0] state; // must be declared as reg since it will be inside always@ block
always @(posedge clk) begin
if (reset) begin // synchronous reset for the system
state <= IDLE; // reset to state 00 (IDLE), found output = 0
found <= 1'b0;
end else begin // everything under else statement is the main FSM
case (state)
IDLE: begin // if state = 00 (IDLE)
found <= 1'b0; // pattern is not yet detected, found = 0
if (in) state <= GOT1; // if the input is 1, go to state 01 (GOT1) // no explicit else statement, so remain in state 00 (IDLE) if ever
end
GOT1: begin // if state = 01 (GOT1)
found <= 1'b0; // pattern is not yet detected, found = 0
if (~in) state <= GOT10; // if the input is 0, go to state 10 (GOT10)
else state <= IDLE; // else, go back to state = 00 (IDLE) to start over
end
GOT10: begin // if state = 10 (GOT10)
if (in) begin // if input = 1...
found <= 1'b1; // detected 101, so found = 1
state <= IDLE; // go back to state = 00 (IDLE) to repeat the cycle again
end else begin // else if input = 0...
found <= 1'b0; // wrong pattern sequence, found = 0
state <= IDLE; // go back to state = 00 (IDLE) to start over
end
end
endcase
end
end
endmoduleKey points:
- The FSM keeps track of the algorithm’s progress in
state. - On each clock edge, we update
stateand possibly set outputs. - Using
localparammakes the code easier to read.
- Think of
always @(posedge clk)as an infinite loop. - On each clock tick, you do one step of the algorithm (based on the current state).
- You can only be in one state at a time (per clock cycle). So you only evaluate assignments under that state.
Common Pitfalls
In sequential logic, registers only update after the clock edge. That means:
- On the rising edge of the clock, the
ifconditions check the old values. - The assignments (
<=) schedule updates, but those new values only appear after the clock edge has passed.
This often surprises beginners because it creates what looks like an “off-by-one” error.
Consider the following Verilog code of an up-down counter with a midpoint indicator:
module counter (
input clk,
input nrst,
input up_down, // counting up or counting down
output reg [3:0] out, // 4-bit output, sweep from 0000 (0) to 1111 (15)
output reg midpoint // set midpoint = 1 only if out = 7
);
always @ (posedge clk or negedge nrst) begin
if (!nrst) begin // asynchronous low-asserted reset
out <= 4'b0000;
midpoint <= 1'b0;
end else begin
if (up_down) begin
out <= out + 1; // counting up
if (out == 4'd7) begin // check if out == 7
midpoint <= 1'b1; // set midpoint = 1
end else begin midpoint <= 1'b0; // else midpoint = 0 end
end else begin
out <= out - 1; // counting down
if (out == 4'd7) begin // check if out == 7
midpoint <= 1'b1; // set midpoint = 1 end else begin midpoint <= 1'b0; // else midpoint = 0 endend
end
end
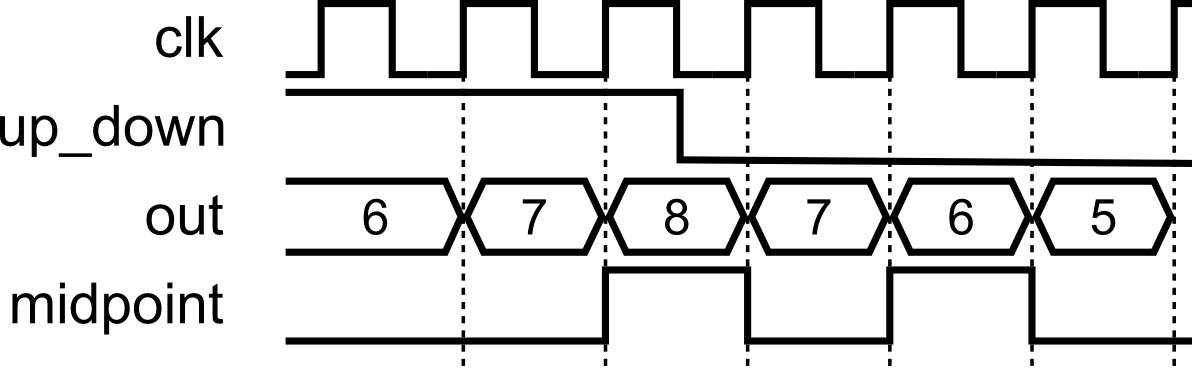
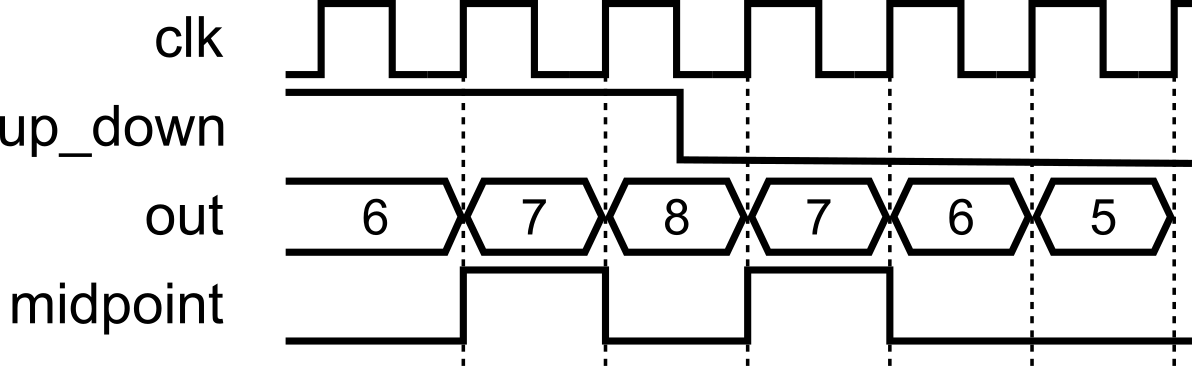
endmoduleAt first glance, it looks like midpoint should become 1 exactly when out equals 7. But in simulation (and hardware), you’ll find midpoint actually goes high when out reaches 8 instead of 7 when counting up (up_down = 1). When counting down (up_down = 0), midpoint actually goes high when out reaches 6 instead of 7.
Why Does This Happen?
Let’s say out = 7 and up_down = 1. On the next clock edge:
The
if (out == 7)check is evaluated using the old value ofout(which is 7). So the condition is true.At the same time,
out <= out + 1;schedulesoutto become 8 after the clock edge.Meanwhile,
midpoint <= 1;is also scheduled.After the clock edge:
outbecomes 8.midpointbecomes 1.
So by the time you observe signals after the clock, out = 8 and midpoint = 1. It looks as though midpoint “missed” 7 — but really it’s because both updates happened together, one cycle later.
This is the one-cycle delay of registers.
Fix 1: Adjust the condition
One way to fix it is to adjust the if checks to anticipate the update:
always @(posedge clk or negedge nrst) begin
if (!nrst) begin
out <= 4'b0000;
midpoint <= 1'b0;
end else begin
if (up_down) begin
out <= out + 1;
if (out == 4'd6) begin // anticipate increment
midpoint <= 1'b1; end else begin midpoint <= 1'b0; end
end else begin
out <= out - 1;
if (out == 4'd8) begin // anticipate decrement
midpoint <= 1'b1; end else begin midpoint <= 1'b0; end
end
end
end- When counting up: if
out == 6, then after increment,outwill become 7. - When counting down: if
out == 8, then after decrement,outwill become 7. - This works correctly, but feels a little inelegant since the logic has to be “shifted” to match the update timing. It can make the code harder to interpret by eye.
Fix 2: Separate Combinational Check
A cleaner approach is to decouple the midpoint logic from the clocked process. Instead of updating midpoint inside the sequential block, we derive it in a combinational block:
always @(posedge clk or negedge nrst) begin
if (!nrst)
out <= 4'b0000;
else begin // this block just handles the up and down counting if (up_down)
out <= out + 1;
else
out <= out - 1; end
end
always @(*) begin // combinational check, not clock dependent!
if (out == 4'd7)
midpoint = 1'b1;
else
midpoint = 1'b0;
end- The counter
outis updated on the clock edge, as before. - But
midpointis evaluated in a separate combinational block, so it immediately reflects whetheroutis equal to 7, without waiting an extra clock cycle. - This makes the code cleaner and separates storage (sequential) from logic (combinational). It can make the code easier to interpret by eye.
FSM Design Example 2: Multiplication by Repeated Addition
Let’s try implementing an arithmetic-style FSM algorithm. A nice starter would be multiplication via repeated addition. It’s simple, algorithmic, and shows off the FSM style of design. We can start describing the algorithm in pseudocode fashion, so we can get an idea of how to capture the algorithm steps into states.
Step 1. Algorithm (software style)
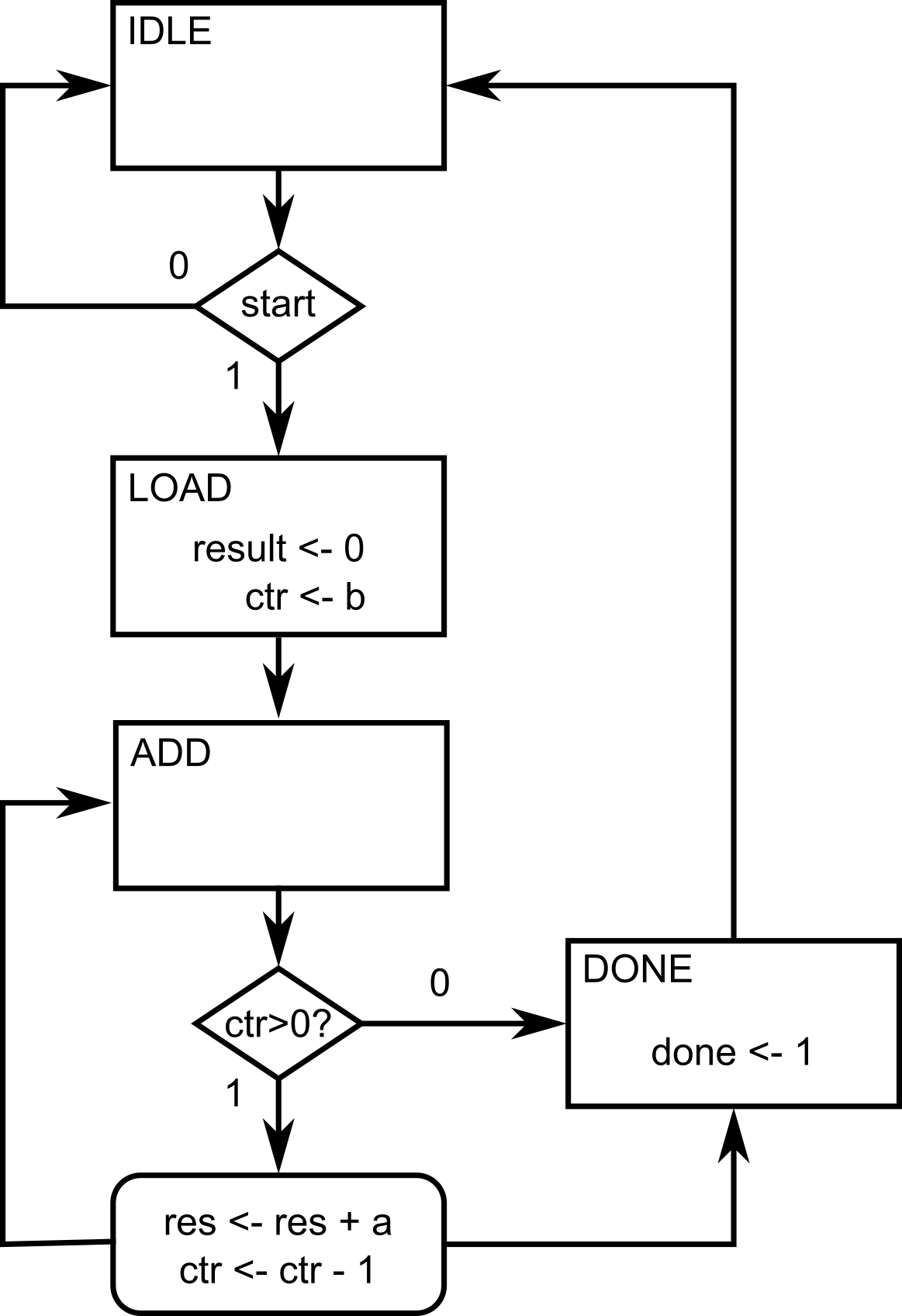
Suppose we want to compute result = a * b. One simple algorithm is:
That’s an iterative algorithm, perfect to map into hardware as a state machine.
Step 2. Define the Steps as States
We can capture this with states:
- IDLE (state = 00): Wait for a
startsignal. - LOAD (state = 01): Initialize
result = 0, set up a counter withb. - ADD (state = 10): Add
atoresult, decrement counter. - DONE (state = 11): When counter = 0, raise
doneflag and return to IDLE.
Step 3. Verilog Implementation
Now, we can start writing the FSM implementation in Verilog, following the algorithm steps that we have defined earlier. Here’s the formal problem description of the module that we are trying to implement.
Design a multiplier circuit using an FSM that takes two unsigned 4-bit inputs a (multiplicand) and b (multiplier), and produces their 8-bit product on result. The multiplication must be carried out using the repeated addition algorithm: initialize result to 0, then add a to result, b times. The design should proceed step by step, performing one addition per clock cycle, until the multiplication is complete.
The circuit should include the following signals:
- clk (input): System clock. The FSM advances one step on each rising edge.
- reset (input): Synchronous reset signal. When asserted, the FSM returns to the IDLE state, clears
result, and resets internal registers. - start (input): Control signal to begin multiplication. When
start = 1in the IDLE state, the FSM loads inputs and starts the algorithm. - a (input, 4 bits): Multiplicand.
- b (input, 4 bits): Multiplier.
- result (output, 8 bits): Final product of
a * b. Updated progressively during the FSM operation. - done (output): Completion flag. Asserted high for one cycle when the multiplication is finished.
module multiplier_fsm(
input clk, // system clock
input reset, // synchronous reset
input start, // start signal to begin multiplication
input [3:0] a, // multiplicand (4-bit)
input [3:0] b, // multiplier (4-bit)
output reg [7:0] result, // multiplication result (up to 8 bits)
output reg done // flag to signal completion
);
// State encoding using localparam for readability
localparam IDLE = 2'b00, // waiting for 'start'
LOAD = 2'b01, // initialize values
ADD = 2'b10, // perform repeated addition
DONE = 2'b11; // multiplication complete
reg [1:0] state; // internal register that holds current FSM state
reg [3:0] counter; // internal register for loop counter (tracks how many adds left)
always @(posedge clk) begin
if (reset) begin
// Reset all values when reset = 1
state <= IDLE;
result <= 0;
counter <= 0;
done <= 0;
end else begin // This is now the main body describing the FSM
case (state)
IDLE: begin
done <= 0; // clear 'done' flag
if (start)
state <= LOAD; // move to LOAD when 'start' asserted (state = 1), else stay in IDLE
end
LOAD: begin
result <= 0; // clear result register
counter <= b; // initialize counter with multiplier value
state <= ADD; // proceed to ADD loop
end
ADD: begin
if (counter > 0) begin // stay in ADD until counter reaches 0
result <= result + a; // add 'a' to result
counter <= counter - 1; // decrement loop counter
end else begin
state <= DONE; // when counter = 0, go to DONE
end
end
DONE: begin
done <= 1; // raise 'done' flag for 1 cycle
state <= IDLE; // return to IDLE, ready for next operation
end
endcase
end
end
endmoduleThis FSM literally executes an algorithm one step per clock cycle.
When
start = 1, the FSM saves the value ofbas thecounter(LOAD state)Each clock cycle in the ADD state:
resultgets one morea.countercounts down.
Once
counter = 0, FSM goes to DONE and assertsdone.The algorithm finishes after
bclock cycles (with an extra 3 cycles as we transitioned from IDLE to LOAD, and later to DONE).
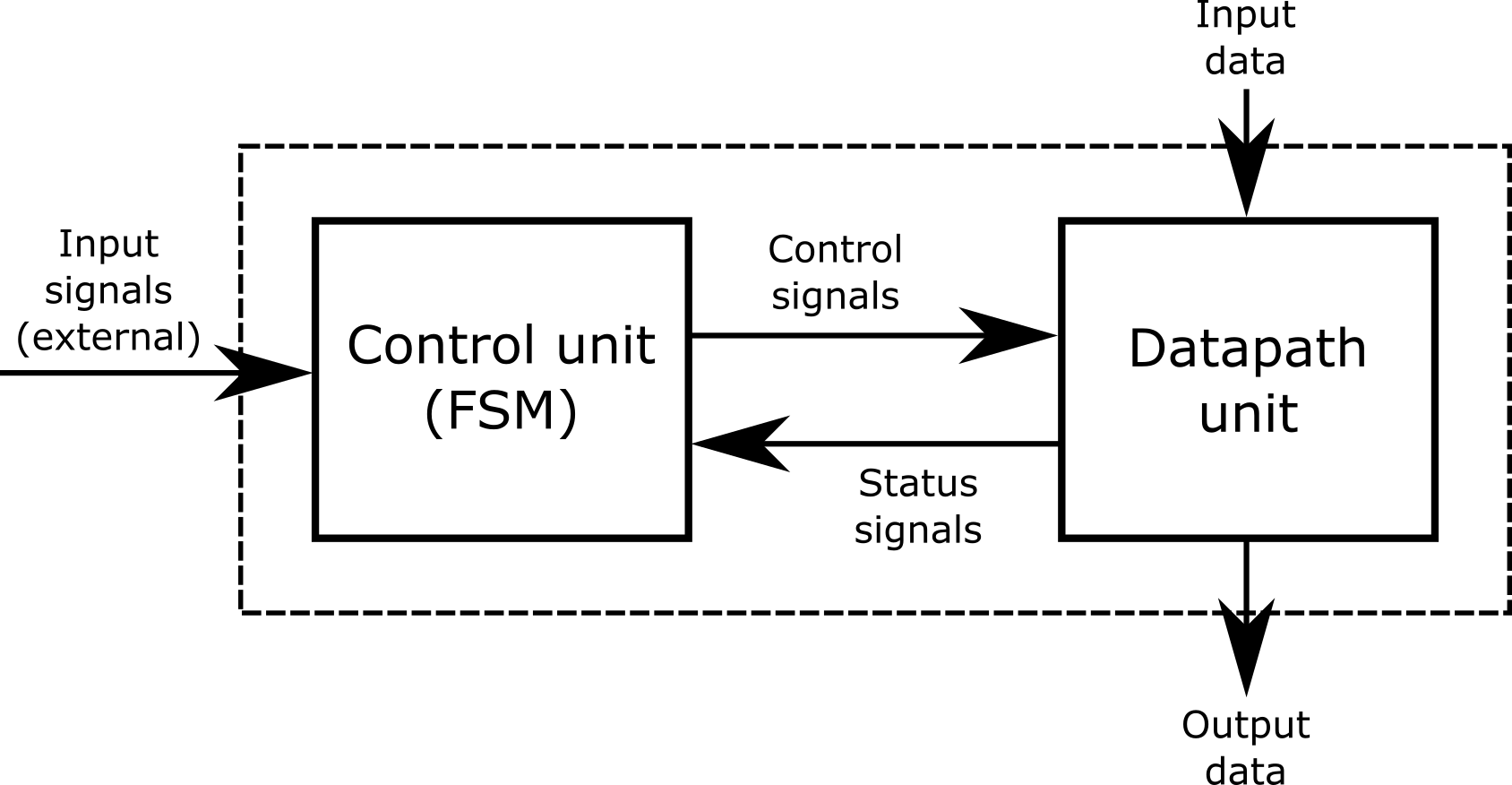
Putting It All Together: Controller + Datapath
Here’s a complete example demonstrating a Hamming weight counter using a controller + datapath approach. The controller is implemented as an FSM, while the datapath simply performs the data transfer and calculations per clock cycle. The FSM is in a single a``lways @(posedge clk) block, and the datapath registers are in another single always @(posedge clk) block.
This is the last design that we will be covering for this crash course! Take your time to trace how the controller (FSM) communicates with the datapath: the controller issues registered control signals on each clock edge, and the datapath responds on the next edge with register updates. Notice we keep them in two separate always @(posedge clk) blocks:one for the FSM, one for the datapath, to make responsibilities crystal clear. This “controller + datapath” pattern is how larger digital systems are built: CPUs, accelerators, and I/O engines are essentially many small datapaths steered by coordinating FSMs. If you can follow the handshakes (start/busy/done), control signals (load/shift/add/etc.), and the timing of when values become valid, you’re reading the same blueprint used in real-world designs. Take it slow and step through a few clock cycles; you’ll see the whole machine come alive.
// =====================================================================
// hamming_weight
// - Counts the number of '1' bits in a 16-bit word, one bit per cycle
// - FSM controller: single always @(posedge clk)
// - Datapath registers: single always @(posedge clk)
// - Flags are simple combinational wires from datapath regs
// - Start pulse launches; 'done' goes high when result is ready
// =====================================================================
module hamming_weight (
input clk,
input rst, // synchronous, active-high
input start, // pulse to start
input [15:0] data_in, // word to popcount
output reg busy, // high while running
output reg done, // 1 when result valid
output reg [4:0] ones_out // the number of 1s. result in [0..16]
);
// -------------------------
// Datapath registers
// -------------------------
reg [15:0] shift_reg; // shifts right; LSB examined each cycle
reg [4:0] ones_accum; // running count of '1' bits
reg [4:0] bit_ctr; // counts down from 16 to 0
// -------------------------
// Combinational flags from datapath
// -------------------------
wire lsb_is_one = shift_reg[0];
wire ctr_is_zero = (bit_ctr == 5'd0);
// -------------------------
// Controller -> Datapath registered controls
// (controlled by FSM; used by datapath next clock)
// -------------------------
reg ld_inputs; // load data_in into shift_reg, reset ones_accum, set bit_ctr=16
reg shift_en; // shift right by 1
reg dec_ctr; // decrement bit_ctr
reg add_lsb; // add LSB into ones_accum
reg hold_result; // capture ones_accum into ones_out
// -------------------------
// FSM state register (3 bits)
// -------------------------
reg [2:0] state;
localparam IDLE = 3'd0,
LOAD = 3'd1,
LOOP = 3'd2,
HOLD = 3'd3, DONE = 3'd4;
// ==============================================================
// Datapath registers: respond to *registered* controls
// ==============================================================
always @(posedge clk) begin
if (rst) begin
shift_reg <= 16'h0000;
ones_accum <= 5'd0;
bit_ctr <= 5'd0;
ones_out <= 5'd0;
end else begin
if (ld_inputs) begin
shift_reg <= data_in;
ones_accum <= 5'd0;
bit_ctr <= 5'd16;
end else begin
// Use current-cycle flags for the updates
if (add_lsb && lsb_is_one) ones_accum <= ones_accum + 5'd1;
if (shift_en) shift_reg <= {1'b0, shift_reg[15:1]}; // logical right shift
if (dec_ctr) bit_ctr <= bit_ctr - 5'd1;
end
if (hold_result) ones_out <= ones_accum;
end
end
// ==============================================================
// FSM controller: single clocked block
// - Assert signals needed by the datapath to control it
// - Observes flags from current datapath registers
// ==============================================================
always @(posedge clk) begin
if (rst) begin
state <= IDLE; ld_inputs <= 1'b0; shift_en <= 1'b0; dec_ctr <= 1'b0; add_lsb <= 1'b0; hold_result <= 1'b0;
busy <= 1'b0; done <= 1'b0;
end else begin
case (state)
IDLE: begin
if (start) begin
ld_inputs <= 1'b1; // load inputs next cycle
busy <= 1'b1;
state <= LOAD;
end end
LOAD: begin
state <= LOOP; // Move into loop on next cycle ld_inputs <= 1'b0; // set ld_inputs back to 0
end
LOOP: begin
// One-bit step per cycle: accumulate, shift, decrement
add_lsb <= 1'b1;
shift_en <= 1'b1;
dec_ctr <= 1'b1;
// When counter hits zero (this cycle's value), finish next
if (ctr_is_zero) begin
hold_result <= 1'b1; // capture ones_accum next clock
state <= HOLD;
end
end
HOLD: begin state <= DONE;
add_lsb <= 1'b0; // set add_lsb back to 0
shift_en <= 1'b0; // set shift_en back to 0
dec_ctr <= 1'b0; // set dec_ctr back to 0 hold_result <= 1'b0; // set hold_result back to 0 done <= 1'b1; // result valid now
end
DONE: begin
busy <= 1'b0; // set busy back to 0, was set to 1 during IDLE earlier done <= 1'b0; // set done back to 0
if (!start) state <= IDLE; // wait for start to drop
end
default: state <= IDLE;
endcase
end
end
endmodule.png)
In this module, we learned:
- Algorithms can be modeled as state machines in hardware.
always @(posedge clk)is like an infinite loop, advancing one step each clock.- Use
localparamfor clear state names. - State transitions are described with
if-elseorcase. - Registers update after the clock, so outputs often appear one cycle later (delayed response).
This forms the basis for implementing any algorithm in hardware.
Module Activity : The Stack
This module’s activity is in this Jupyter Notebook. Line by line, you can execute the code in order to see how the environment works. I recommend pressing the Run all button at the top and giving it about 2 minutes to download all of the requirements. In the middle of the notebook, you’ll find a section where you need to fill in some verilog code. Time to show your stuff.
A stack is a programming data structure (or type of memory, really) where you can write data (called pushing to the top of the stack). When you read data (called a popping from the top of the stack), the data comes out in reverse order of how it came in. For tasks that need you to backtrack, like depth-first searches, or text-processing, the stack is useful. Implementing these algorithms in hardware can require the use of a stack-type memory.
In this activity, your task is to implement a stack using advanced sequential logic. As a guide, remember to use a finite state machine to model the behavior of a stack before writing your code.